
Toolmonitor Robotics
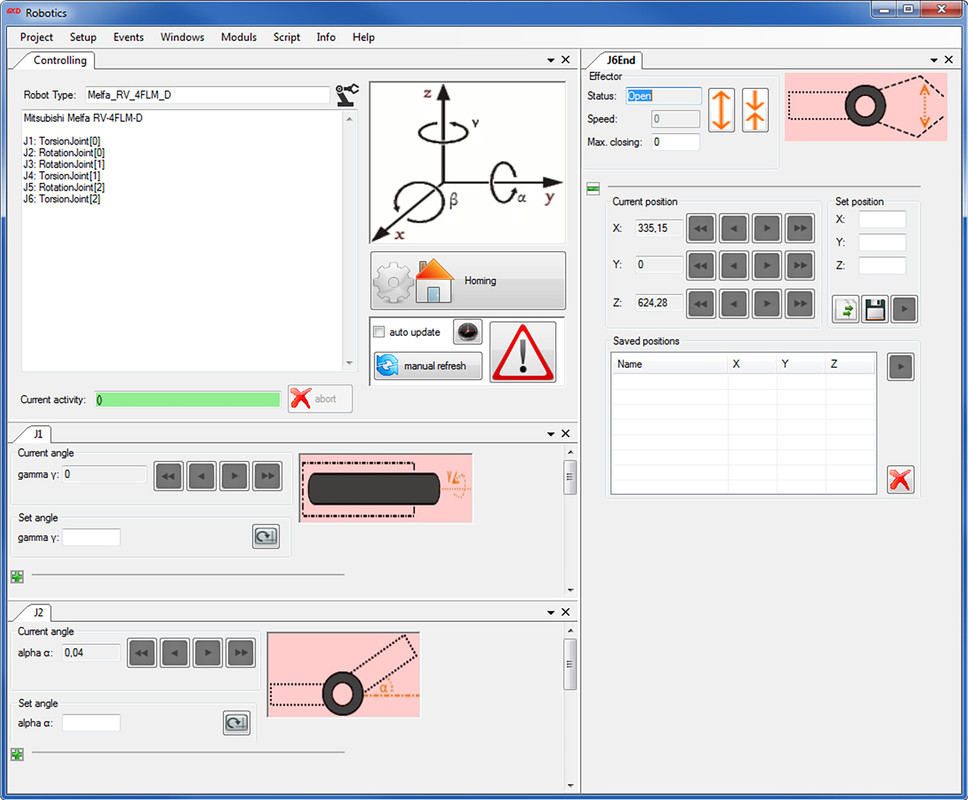
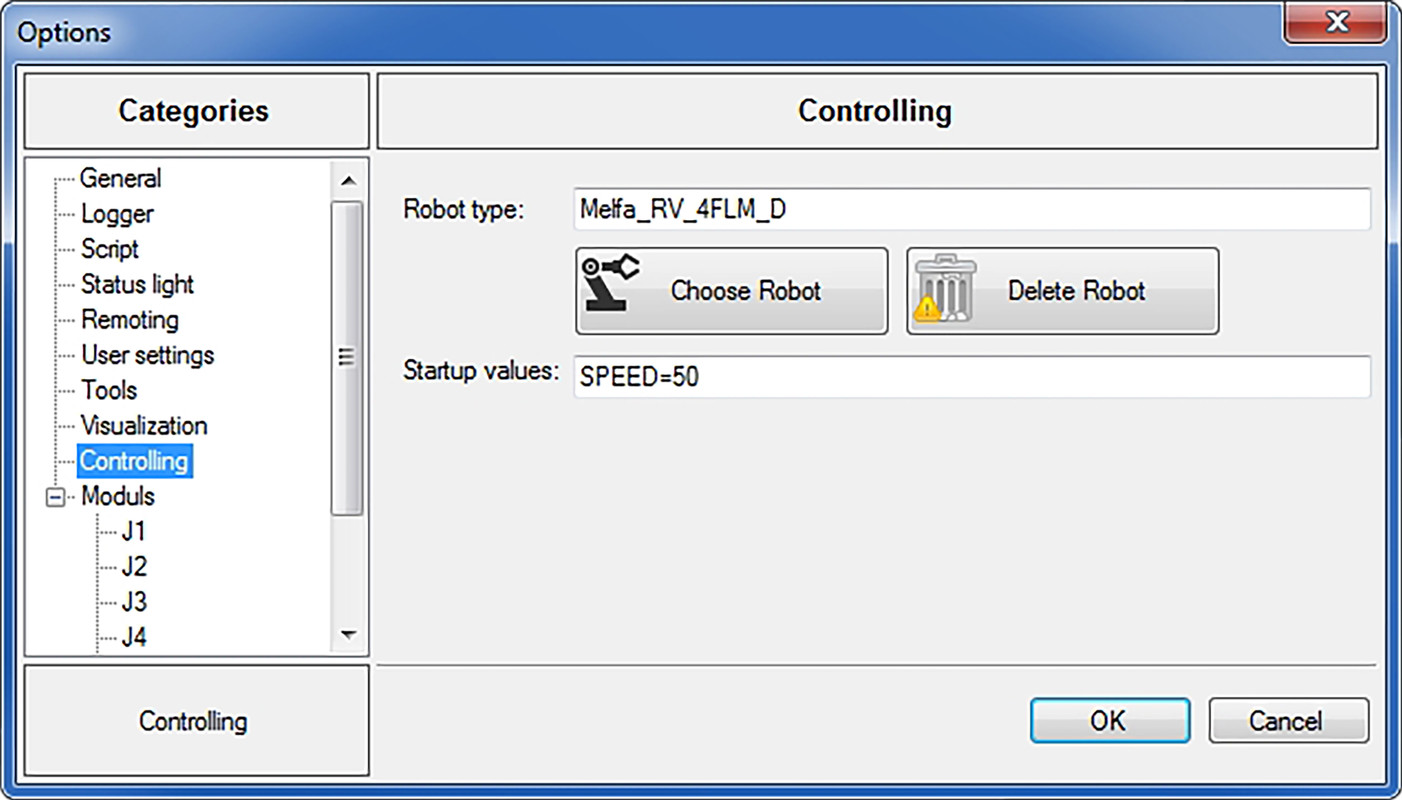
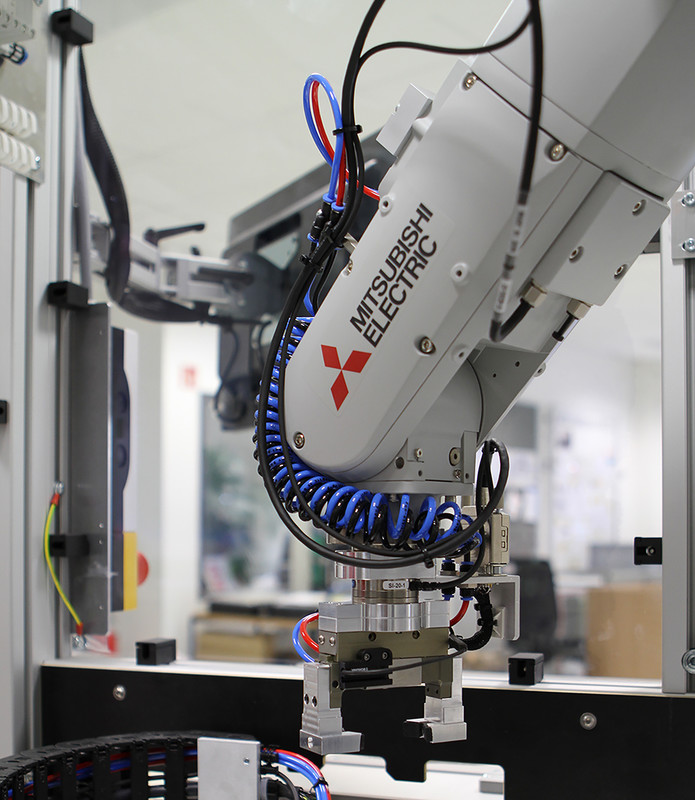
The Toolmonitor Robotics supports and allows the controlling of various types of industrial robots within the electronic production.
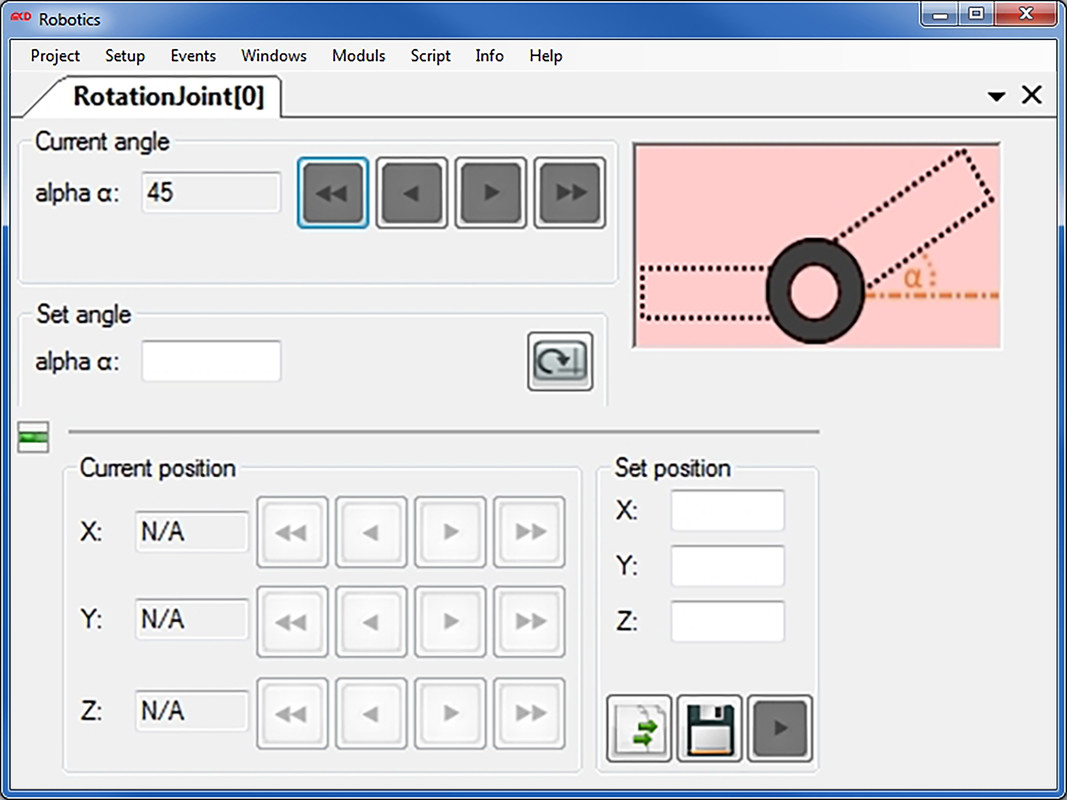
Axis can be controlled manually, the robot position can be defined and special positions can be integrated. This process runs on so-called snapshots, which are running singularily or in sequences. The integration of several snapshots that are running one after another offers an efficient test process because the complex reload of the program memory is not necessary.
A gripper attached to the kinematic chain as an end unit is opened, closed and moved as defined through the axis by the Toolmonitor.
The following elements can be controlled by the Toolmonitor Robotics:
- Ball joints
- Rotation joints
- Torsion joints
- Linear joints
- Platforms
- Grippers
For third-party software, the Toolmonitor can be fully remote controlled. COM/DCOM or .Net-Assembly is used as an interface. This allows the Toolmonitor Robotics to be integrated in a large number of applications (Microsoft Visual Studio® (C#, C++, Visual Basic), Microsoft Office® (e.g. Excel®), Open Office®, LabView®, MCD TestManager CE).
Order Information
License fee for Toolmonitor Robotics
Order number: 150225

Further information about licensing can be found here.
Manual Toolmonitor Robotics
Download Toolmonitor Robotics Manual
pdf-Datei | 1.7 MB
manual-toolmonitor-robotics-mcd.pdf